








Bộ mã hóa vòng quay Encoder


Power supply: 5V or 24V
Output Signal: Analog, SSI, TTL, HTL, Profinet, Profibus, Line Driver..
Shaft: Solid Shaft, hollow shaft, blind hollow shatf…
Diameter housing: ø36, ø40,…ø58, ø60.
Cable: M4, M9, M12 connector
Material: Stainless Still
Bộ mã hóa vòng quay Encoder là bộ phận dùng để mã hóa các dạng tín hiệu nhị phân (Binary) sang các dạng tín hiệu tương tự khác. Các bộ phận mã hóa vòng quay này được thiết kế kèm trong các động cơ điều khiển. Điển hình là động cơ Servo…Trong bài viết này, cùng mình tìm hiểu thêm về bộ mã hóa Encoder này là gì? Nguyên lý hoạt động ra sao và có cấu tạo thế nào?
Bộ mã hóa vòng quay Encoder là gì?
Encoder là tên tiếng anh được dùng nói đến các bộ phận có liên quan đến sự mã hóa thông tin. Để hiểu rõ thế nào về mã hóa thông tin, bạn hãy hình dùng có một đoạn mã nhị phân là: 0011. Khi chuyển đổi sang giá trị thập phân sẽ có giá trị là 3.
Vậy quá trình chúng ta chuyển đổi mã nhị phân sang thập phân được gọi là mã hóa. Hay trong tiếng anh gọi là Encoder.
Ứng dụng mã hóa này sẽ được sử dụng trong các động cơ servo. Mỗi động cơ servo sẽ được cấu tạo thêm một đĩa code. Khi động cơ servo quay, sẽ làm cho đĩa code này quay theo.
Đặc điểm của những đĩa code này được thiết kế thêm kẽ hở sao cho trùm sáng chiếu qua.
Giá trị trùm sáng khi chiếu lên cảm biến quang sẽ có dạng “Tối – Tối – Sáng – Sáng”. Tương ứng với giá trị sẽ là “0-0-1-1”. Và rồi từ đó, tín hiệu sẽ được chuyển đổi sang các tín hiệu tương ứng.
Chung quy lại, bộ mã hóa vòng quay Encoder là bộ phận phục vụ cho việc điều khiển các cơ cấu cần chuyển động, hành trình. Cho các bộ phận của máy CNC, phay, tiện, khoan…và điển hình là cánh tay Robot.
Không những dùng để điều khiển, bộ mã hóa vòng quay còn dùng để truyền tín hiệu về bộ điều khiển. Tức là nó sẽ cho biết là hành trình di chuyển đã di chuyển được bao nhiêu thông qua số vòng quay hoặc số góc chuyển động.
Hiện nay, các bộ mã hóa vòng quay Encoder chủ yếu dưới dạng tín hiệu xung. Còn có thêm các bạn tín hiệu ngõ ra Analog như là: 4-20mA, 0-10V, profibus, profinet…
Cấu tạo của một Encoder
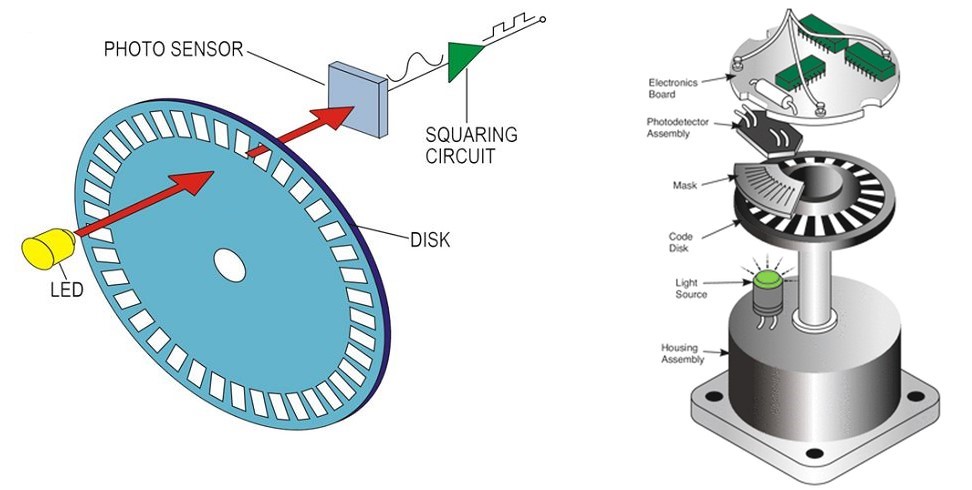
Đối với một bộ mã hóa vòng quay Encoder cơ bản sẽ có cấu tạo gồm 5 phần cơ bản như sau:
- Bộ phận chuyển động cấu tạo từ thép không rỉ
- Đèn chiếu
- Đĩa Code
- Bộ phận cảm quang
- Board mạch chuyển đổi mã nhị phân sang tín hiệu tương tự.
Khi bộ phận Roto của động cơ servo được các động bởi moment xoắn. Tức là trục roto này chuyển động và quay quanh trục của nó. Dẫn đến sẽ làm cho đĩa Code quay cùng phương cùng chiều với trục Roto.
Đèn chiếu sáng sẽ chiếu xuyên qua đĩa Code đến bộ phận cảm quang. Chỗ này nó sẽ phân tích tín hiệu như mình mô tả trên.
Rồi được board mạch chuyển đổi tín hiệu thành các dạng tín hiệu tương ứng.
Vì sao encoder được sử dụng rộng rãi?
Bộ mã hóa vòng quay Encoder hiện nay sẽ được dùng phục vụ với hai mục đích chính:
- Dùng để điều khiển động cơ dựa trên tín hiệu Encoder
- Dùng để đo lường hành trình chuyển động thông qua bộ mã hóa Encoder
Việc dùng để điều khiển động cơ thường được sử dụng nhiều trong động cơ servo. Các loại động cơ servo này thường được dùng kèm với biến tần.
Biến này này sẽ dùng điều khiển các động cơ servo. Nhằm kiểm soát được tốc độ, vị trí và moment xoắn tác động lên trục chuyển động.
Điển hình được sử dụng trong băng truyền tải, bộ phận chuyển động trục X, Y, Z của máy phay, máy cắt Laser, máy CNC…Và thường được các bộ điều khiển PLC điều khiển thông qua biến tần, mạch điện Arduino…
Không những vậy, việc sử dụng động cơ servo sẽ giúp bạn kiểm soát được cả số vòng tay, tốc độ góc, vận tốc góc, tần số…trong một cơ cấu vận hành.
Từ hai lý do cơ bản đó là dễ dàng điều khiển và độ chính xác cao. Nên động cơ servo được sử dụng nhiều, mà bản chất của động cơ này đó là sử dụng bộ mã hóa vòng quay Encoder.
Đối với ứng dụng đo lường hành trình chuyển động sẽ ngược lại với ứng dụng trên. Thay vì nhận tín hiệu điều khiển từ biến tần, PLC…truyền tín hiệu đến bộ mã hóa Encoder để điều khiển động cơ.
Thì loại này sẽ dựa vào chuyển động để đo lường lại hành trình di chuyển. Và đồng thời truyền tín hiệu về đến PLC.
Dễ hiểu cho ứng dụng này, mình lấy ví dụ trong cơ cấu chuyển động cánh tay robot. Trong một khâu chuyển động của một khớp cánh tay robot. Thì nó sẽ có một số chuyển động hạn chế.
Vậy loại bộ mã hóa vòng quay này sẽ đo hành trình chuyển động trong phạm vi hạn chế này.
Cơ bản như là trong cánh tay robot được chia thành 3 khớp là A, B, C. Khớp A sẽ dùng làm trục chuyển động và tự quay quanh chính nó là trục Z. Còn khớp B có thể chuyển động trong mặt phẳng yOz.
Tuy nhiên, nếu chuyển động quá 90 độ thì cánh tay Robot sẽ bị hư bởi sự càng bộc từ khớp cố định. Vì vậy, bộ mã hóa vòng quay này sẽ đo lường cho phép cánh tay chuyển động với tốc độ góc là 90 độ này thôi.
3 bộ mã hóa vòng quay Encoder phổ biến
Bộ mã hóa vòng quay Encoder được phân chia thành 3 loại dựa vào đặc điểm ứng dụng của nó.
Bộ mã hóa Encoder tuyến tính
Loại mã hóa Encoder đầu tiên đó là dạng encoder với ngõ ra tuyến tính. Thay vì chúng ta cần phải sử dụng đến biến tần để điều khiển, thì bây giờ loại encoder này bạn chỉ cần đấu nối trực tiếp đến bộ điều khiển PLC.
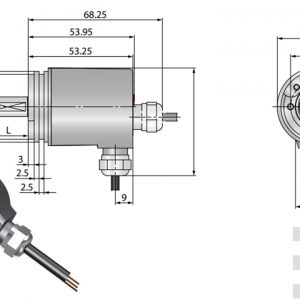
Waycon đã thiết kế được bộ mã hóa thuận tiện cho người dùng. Đó chính ra dùng tín hiệu tuyến tính 4-20mA hoặc 0-10V để phục vụ việc đo lường. Đối với Encoder tuyến tính này nó sẽ có đặc điểm thông số kỹ thuật như sau:
- Nguồn: 24V
- Tín hiệu ngõ ra: Biến trở 1KΩ, điện áp 0-10V, dòng 4-20mA
- Nhiệt độ môi trường: -20…+85
- Đường kính encoder: Ø40, Ø60
- Đường kính trục: Ø6, Ø10
- Tốc độ góc: 90 đến 43200 độ (Tùy vào từng Option)
- Số vòng quay tối đa: 200 r/m
- Moment xoắn: 0,008 Nm
- Tải trọng lên trục: tối đa 50N
- Cấp bảo vệ: IP67
- Tuổi thọ encoder: > 5 triệu vòng
- Dây kết nối: M12 – 4 pins.
Ví dụ nếu như bạn đang dùng loại encoder quay từ 0 đến 3600 độ, tức là 10 vòng quay. Thì tín hiệu sẽ tương ứng là khi ở 0 độ, giá trị là 4mA. Khi encoder quay đủ 10 với tốc độ góc là 3600 độ, tín hiệu tương ứng là 20mA.
Bộ mã hóa Encoder tương đối
Bộ mã hóa Encoder tương đối được dùng thể đo lường thông tin về vị trí chuyển động hoặc số vòng quay. Nhưng, đối với loại Encoder này thì dải xung của nó không được nhiều.
Có thể thỉ có 1 đến 3 dải xung. Vì lý do này, loại Encoder này chỉ phù hợp cho việc xác định tốc độ của động cơ hoặc xác định vị trí.
Ngoài ra bộ mã hóa này còn có thêm một đặc điểm, đó chính là không thể ghi nhớ rõ tần số xung sau khi ngừng cấp nguồn. Mỗi khi tắt động cơ và khởi động lên lại, encoder này giống như bị reset lại trạng thái.
Dưới đây là một số thông số kỹ thuật của bộ mã hóa vòng quay này
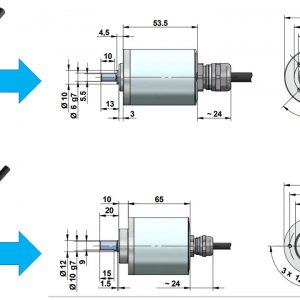
- Nguồn: 4.5…5,5 V
- Nhiệt độ môi trường: -20…+85
- Đường kính encoder: Ø40, Ø60
- Đường kính trục: Ø6, Ø10
- Số xung: 1250/2500
- Tần số xung: 300 – 500 (Khz)
- Tín hiệu ngõ ra: Line Driver (ABZ,/ABZ), TTL, HTL…
- Nhiệt độ môi trường: -20…+85
- Dây kết nối: 8pin; 0,25m
- Cấp bảo vệ: IP67
Bộ mã hóa Encoder tuyệt đối
Tiếp đến là bộ mã hõa Encoder tuyệt đối, đây là bộ dùng để phản hồi thông tin về vị trí và tốc độ của động cơ dưới dạng tín hiệu bit, tín hiệu kỹ thuật số…
Đặc điểm của bộ này, nó phản hồi tín hiệu chính xác đến từng tốc độ gốc hay vị trí ở dưới dạng mã nhị phân hoặc grey…
Thêm một đặc điểm mới về bộ này, đó chính là có khả năng ghi nhớ được vị trí hành trình đã di chuyển sau khi ngừng cấp nguồn. So sánh với bộ encoder tương đối, thì encoder tuyệt đội có điểm trội hơn về tính năng này.
Nên dẫn đến, bộ này được sử dụng nhiều trong cơ cấu cánh tay robot để có thể giám sát được hành trình. Vì vậy mà giá thành của bộ này sẽ mắc hơn bộ tương đối.
Dưới đây là một vài thông số kỹ thuật của bộ mã hóa tuyệt đối Waycon:
- Nguồn: 24V
- Dạng trục: dạng trục quay, trục rỗng
- Đường kính trục: từ Ø6 – Ø10
- Chiều dài trục quay: từ 12,5 đến 20mm
- Độ sâu trục rỗng: 18,5mm
- Tín hiệu ngõ ra: 0-10V, 0-5V, 4-20mA (Option: SSI, EtherCAT, CANopen)
- Cấp bảo vệ: IP67
- Dây kết nối: Connector M12 – 5 pin.
Mua bộ mã hóa vòng quay Encoder ở đâu?
Tổng kết lại, bộ mã hóa vòng quay Encoder là bộ phận thường được sử dụng nhiều trong các động cơ servo, cơ cấu truyền động băng tải, cánh tay robot…
Không những dùng để điều khiển, một số loại còn dùng để đo lường hành trình, vị trí, tốc độ, số vòng quay…
Hiện nay, công ty mình chuyên cung cấp các loại Encoder với các dạng tín hiệu ngõ ra là 4-20mA, 0-10V, CANopen, profinet, profibus, SSL, TTL…
Để cần tìm thêm giải pháp về các loại Encoder này, các bạn hãy liên hệ thông tin bên dưới để mình hỗ trợ tư vấn các loại encoder phù hợp nhé.
Cảm ơn các bạn đọc bài của mình!
Kỹ sư cơ điện – tử
Nguyễn Thành Đạt
Sản phẩm tương tự

Cảm biến đo


Cảm biến đo chiều dài

Cảm biến đo chiều dài

Cảm biến đo


Cảm biến đo chiều dài


Cảm biến đo chiều dài


Cảm biến đo


Cảm biến đo